
دکتر محمدرضا عاطفی

عضو هیات علمی دانشگاه
مشاور استراتژی و نوآوری
سیستم هدف جو
مقدمه
حلقههای بازخوردی تشکیل دهنده ساختارهای پایهای سیستمها هستند. بازخورد در سیستمها تقریباً همه رفتارهای پویا را ایجاد میکند. برای استفاده موفقیت آمیز از دینامیک سیستم به عنوان یک ابزار یادگیری، باید اثرات حلقههای بازخورد بر روی سیستمهای پویا را درک کرد. یکی از راههای استفاده از دینامیک سیستم برای درک بازخورد، استفاده از نرمافزار شبیهسازی است. شبیه سازی کامپیوتری ابزار بسیار مفیدی برای کاوش سیستمها است. با این حال، باید بتوان از ابزار شبیهسازی دیگر دینامیک سیستم یعنی شبیهسازی ذهنی استفاده کرد. مجموعهای قوی از مهارتهای شبیه سازی ذهنی، توانایی اعتبارسنجی، اشکال زدایی و درک سیستمها و مدلهای پویا را افزایش میدهد.
در این بینش در درجه اول به بازخورد منفی میپردازیم و با مروری بر برخی مفاهیم کلیدی آغاز میکنیم. مجموعهای از مثالها در پایان به تقویت درک پویایی بازخورد در یک حلقه بازخورد منفی ساده کمک میکند.
بازخورد منفی
سیستمهایی که بازخورد منفی از خود نشان میدهند در همه جا وجود دارند، از جمعیتی که در معرض انقراض قرار دارند تا ترموستات ساده. در هر شرایطی، بازخورد منفی رفتار هدف جویی را نشان میدهد. به عبارت دیگر تفاوت وضعیت فعلی سیستم با حالت مطلوب باعث میشود که سیستم به سمت حالت مطلوب حرکت کند. هر چه وضعیت سیستم به هدف خود نزدیکتر باشد، نرخ تغییر کمتر میشود تا زمانی که سیستم به هدف خود برسد. این هدف میتواند از سیستمی به سیستم دیگر متفاوت باشد. در یک مدل انقراض جمعیت، هدف صفر است – حیوانات به مردن خود ادامه میدهند تا زمانی که دیگر چیزی باقی نماند. از طرف دیگر، یک ترموستات یک هدف دمای اتاق مورد نظر را دارد.
ساختار سیستم هدف جو
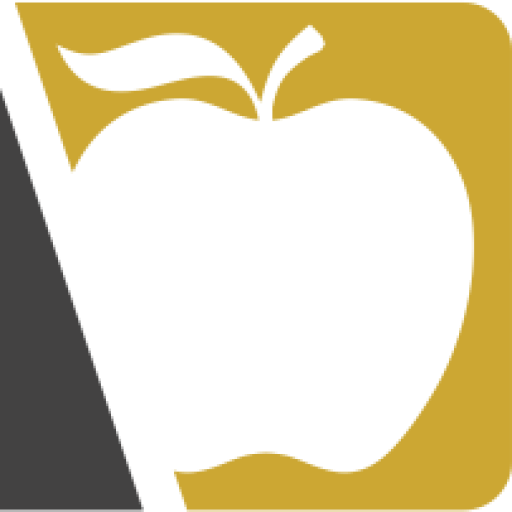
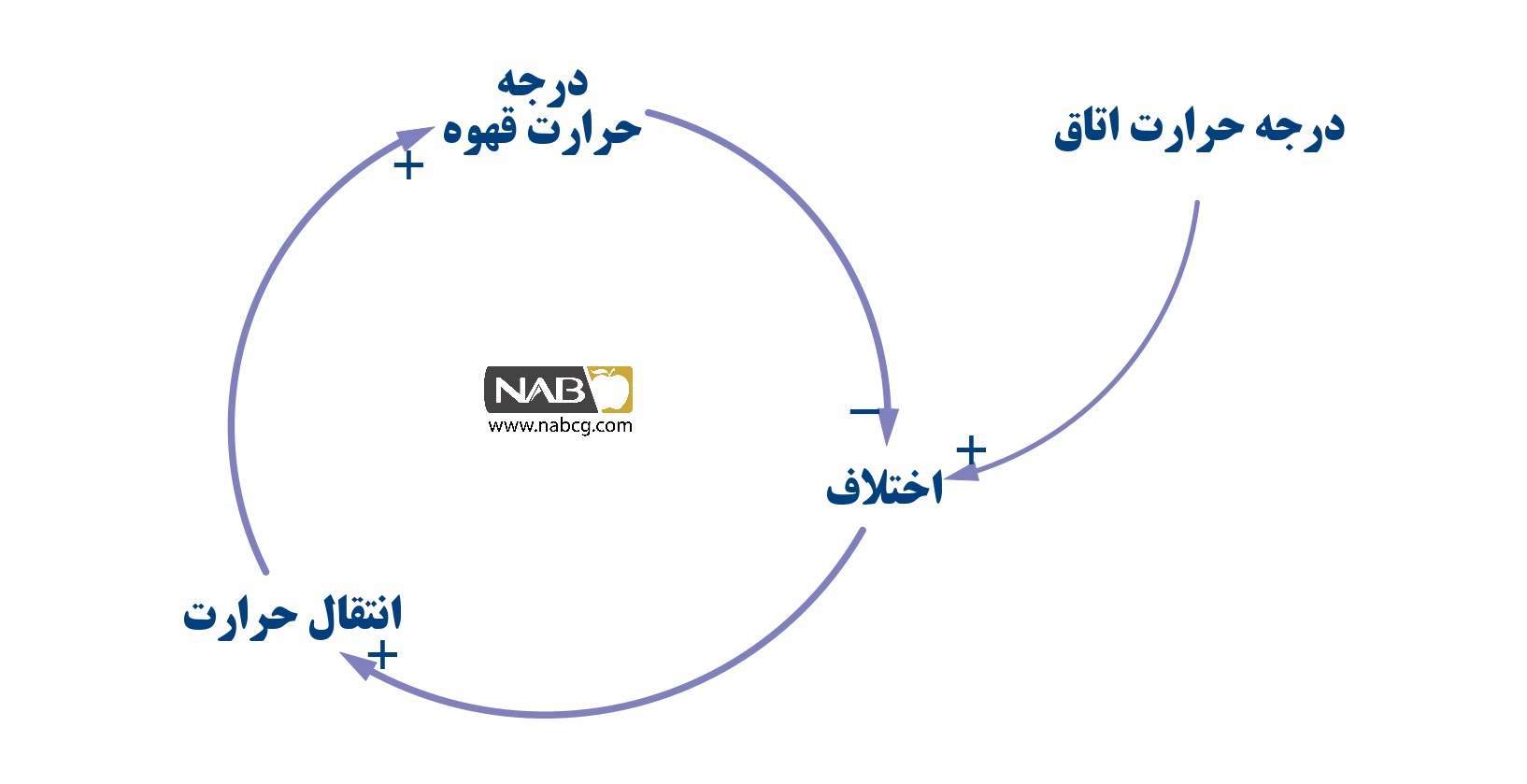
حلقههای بازخوردی مثبت سبب ایجاد رشد میشوند، انحرافات را بزرگ میکنند، و تغییر را تقویت میکنند. در مقابل حلقههای منفی در جستجوی توازن، تعادل، و سکون اند. حلقههای بازخوردی منفی برای رساندن وضعیت سیستم به هدف یا وضعیت مطلوب فعالیت میکنند. این حلقهها هر گونه اختلالی را که وضعیت سیستم را از هدفش دور میکند خنثی میکنند. همه حلقههای بازخوردی منفی ساختار نشان داده شده در ذیل را دارند. وضعیت سیستم با هدف مقایسه میشود. چنانچه اختلافی میان وضعیت مطلوب و واقعی وجود داشته باشد، اقدام اصلاحی صورت میگیرد تا وضعیت سیستم را به خط هدف برگرداند.
هر حلقه منفی شامل فرآیند مقایسه شرایط مطلوب و واقعی و انجام اقدام اصلاحی است. گاهی وضعیت مطلوب سیستم و اقدام اصلاحی روشن است و تحت کنترل یک تصمیم گیرنده قرار دارد. گاهی هم هدف آشکار نیست و تحت کنترل آگاهانه یا به طور کلی تحت کنترل عامل انسانی قرار ندارد. مقدار خوابی که برای رفع خستگی به آن نیاز دارید عاملی است روان شناختی و تحت کنترل آگاهانه شما قرار ندارد. یک فنجان قهوه از طریق بازخورد منفی سرد میشود تا زمانی که به دمای اتاق برسد.
در بیشتر موارد، نرخی که وضعیت سیستم براساس آن به هدفش نزدیک میشود با کم شدن اختلاف بین وضعیت سیستم و هدف، کاهش مییابد. غالبا نرخ نزدیک شدن به هدف ثابت نیست تا بلافاصله با به دست آمدن هدف متوقف شود. چون اختلافات بزرگ بین وضعیتهای مطلوب و واقعی تمایل به ایجاد واکنشهای بزرگ دارند، نزدیک شدن به صورت تدریجی صورت میگیرد، این در حالی است که اختلافات کوچک تمایل به ایجاد واکنشهای کوچک دارند. جریان گرمایی از فنجان قهوه شما به هوای یک اتاق وقتی که اختلاف دمایی بین آنها زیاد است بیشتر است و با کم شدن این اختلاف جریان گرمایی نیز کاهش مییابد. وقتی دماهای قهوه و اتاق برابرند هیچ گونه جریان گرمایی خالصی بین آنها وجود ندارد.
وقتی رابطه بین اندازه اختلاف و اقدام اصلاحی خطی باشد، نرخ تعدیل دقیقا متناسب با اندازه اختلاف است و رفتار هدف جوی به دست آمده اضمحلال یا نزول نمایی است. به وسیله زمان دو برابر شدنش مشخص میشود، نزول نمایی خالص به وسیله نیمه عمرش – زمانی که طول میکشدتا نیمی از اختلاف باقیمانده از بین رود – مشخص میشود.
رفتار مدل
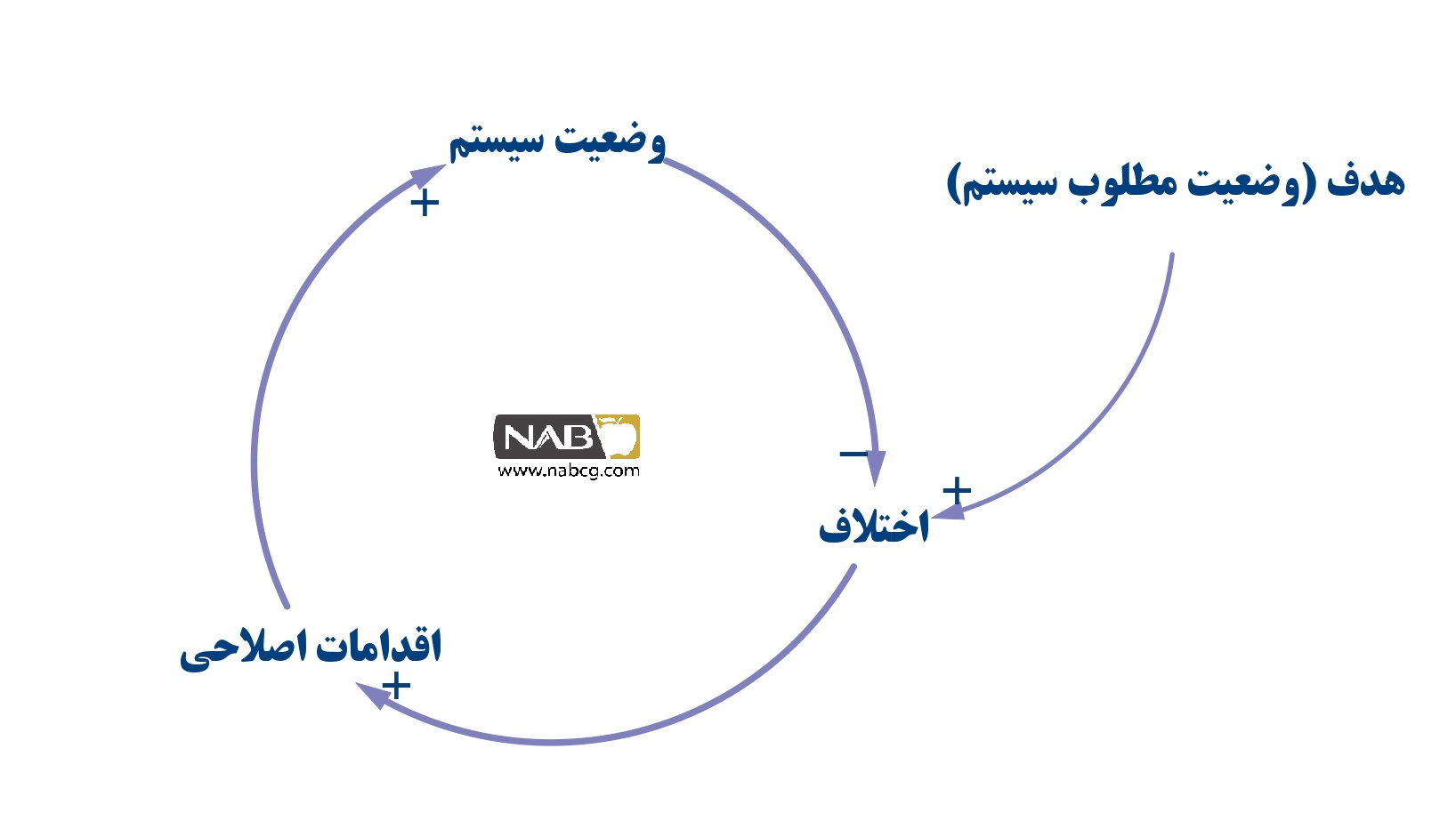
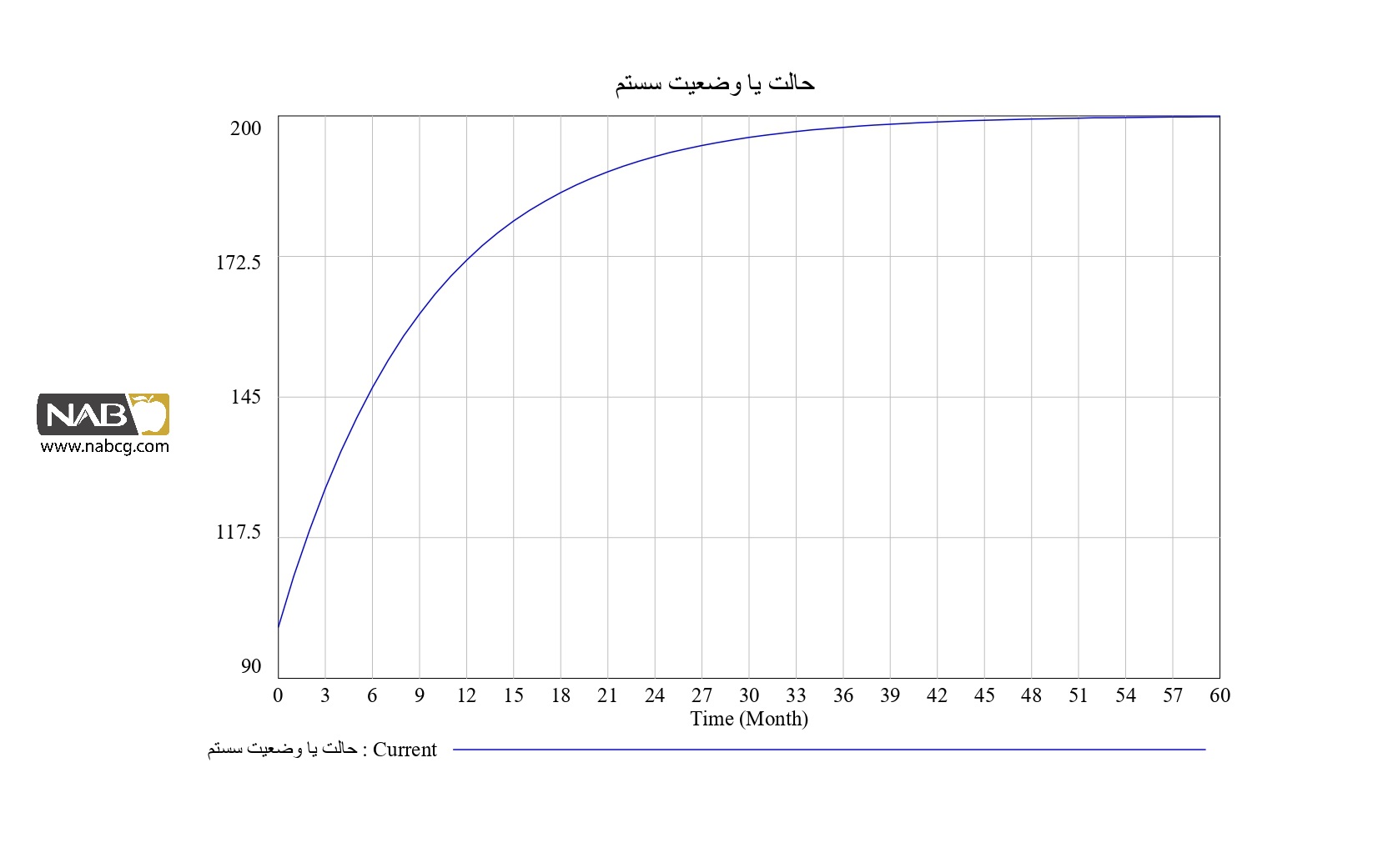
رفتار یک سیستم هدف جو به شکل زیر است:
این حالت زمانی اتفاق میافتد که مقدار اولیه متغیر حالت کمتر از هدف باشد و از مقادیر کمتر به سمت هدف حرکت میکند.
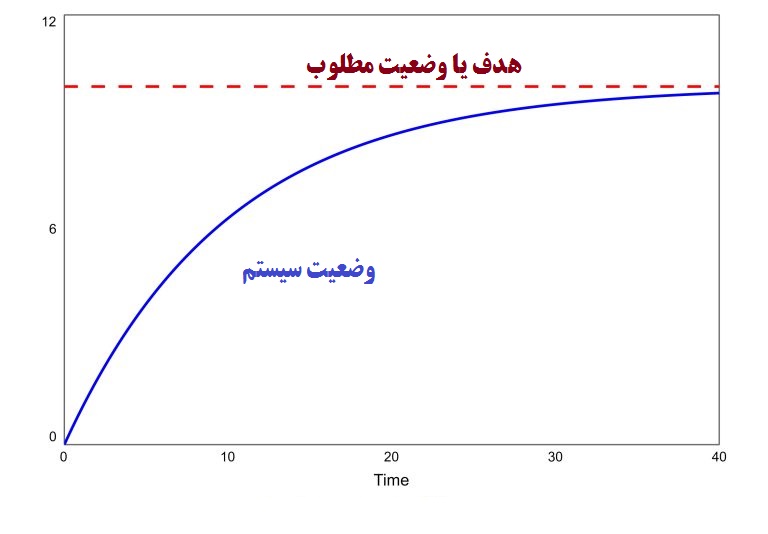
در صورتی که مقدار اولیه متغیر حالت بیشتر از مقدار هدف باشد از مقادیر بالاتر از هدف به سمت متغیر حالت کاهش مییابد و با شیب کاهنده به سمت مقدار حدی هدف حرکت میکند.
تعریف جستجوی هدف
سیستمهای کنترل یا سایبرنتیک با این واقعیت مشخص میشوند که دارای هدف هستند. این سیستمها اهداف یا وضعیت مطلوب یا طبیعی دارند که سعی میکنند به آنها دست یابند و با وجود موانع یا آشفتگیها، آنها را حفظ کنند.
سیستمهای کنترل ترکیبی از اجزاء (الکتریکی، مکانیکی، حرارتی یا هیدرولیک) هستند که با هم عمل میکنند تا عملکرد واقعی سیستم را نزدیک به مجموعه مشخصی از مشخصات عملکرد حفظ کنند. سیستمهای کنترل حلقه باز (مثلاً ساعتهای زنگ دار) آنهایی هستند که خروجی در آنها تأثیری بر ورودی ندارد. سیستمهای کنترل حلقه بسته (به عنوان مثال سیستمهای کروز کنترل خودرو) آنهایی هستند که در آنها خروجی به گونهای بر ورودی تأثیر میگذارد که مقدار خروجی مشخص شده را حفظ میکند. یک سیستم حلقه بسته باید شامل روشی برای اندازه گیری خروجی آن برای درک تغییرات باشد تا بتوان اقدامات اصلاحی را انجام داد. سرعتی که یک سیستم کنترل حلقه بسته ساده برای تصحیح خروجی خود حرکت میکند با فرکانس طبیعی و نسبت میرایی آن توصیف میشود.
سایبرنتیک
احتمالاً مهمترین نوآوری سایبرنتیک توضیح آن در مورد هدفمندی است. یک سیستم خودمختار، مانند یک فرد یا یک ارگانیسم، را میتوان با این واقعیت مشخص کرد که اهداف خود را دنبال میکند و در برابر موانع محیطی مقاومت میکند که باعث میشود از وضعیت مطلوب خود منحرف شود. بنابراین، هدف مداری مستلزم تنظیم یا کنترل عوامل حواس پرتی است.
یک مثال خوب اتاقی است که در آن دما توسط ترموستات کنترل میشود. تنظیم ترموستات دمای مورد نظر یا وضعیت هدف را تعیین میکند. اغتشاشات ممکن است در اثر تغییرات دمای بیرون، باز شدن پنجرهها یا درها، پیش رانها و غیره ایجاد شوند. وظیفه ترموستات این است که اثرات چنین تاثیراتی را به حداقل برساند و در نتیجه دما را تا حد امکان ثابت نگه دارد.
بقا
در بنیادی ترین سطح، هدف یک سیستم خودمختار، بقا است، یعنی حفظ سازمان اساسی آن. این هدف با انتخاب طبیعی در همه موجودات زنده ایجاد شده است: آنهایی که بر بقا متمرکز نبودند به سادگی حذف شده اند. علاوه بر این هدف اصلی، این سیستم دارای اهداف فرعی مختلفی مانند گرم نگه داشتن یا یافتن غذا خواهد بود که به طور غیر مستقیم به بقای آن کمک میکند. سیستمهای مصنوعی، مانند خلبانهای خودکار و ترموستاتها، مستقل نیستند: اهداف اولیه آنها توسط طراحانشان ساخته شده است. آنها آلوپوئتیک هستند: به این معنی که وظیفه آنها تولید چیزی غیر از خود (“allo”) است.
مثال ها
سرد شدن قهوه
برای درک نحوه عملکرد فرآیندهای متعادل کردن، به یک فنجان قهوه داغ روی میز فکر کنید. “هدف” خنک شدن قهوه و رسیدن به دمای اتاق است (خواه شما بخواهید یا نه!). حالت مطلوب دمای اتاق و حالت واقعی دمای قهوه است. عمل اصلاحی طبیعی، طبق قوانین ترمودینامیک، انتقال حرارت بین قهوه و هوای اطراف است. بنابراین خنک کردن قهوه یک فرآیند متعادل کننده طبیعی است که بدون هیچ گونه اقدام اصلاحی صریحی رخ میدهد. اسمز یا پخش عطر در اتاق نمونههای دیگری از این حرکت به سمت تعادل است.
 کنترل خودکار آب و هوا
کنترل خودکار آب و هوا
 کنترل خودکار آب و هوا
کنترل خودکار آب و هوایکی دیگر از نمونههای پرکاربرد فرآیند تعادل، ترموستات است. در این حالت دمای اتاق حالت واقعی، تنظیم ترموستات حالت مطلوب و اقدام اصلاحی خروجی یک سیستم گرمایش /سرمایش یا سیستم تهویه مطبوع است. هر گاه فاصلهای بین دمای واقعی و مطلوب وجود داشته باشد، کوره یا واحد تهویه مطبوع به طور خودکار روشن میشود تا زمانی که فاصله بین دمای واقعی و دمای مطلوب نزدیک به صفر شود و اتاق در سطح مطلوبی قرار گیرد. این نمونهای از یک فرآیند متعادل سازی است که در آن ما در واقع دستگاهی را برای کنترل فعال تر برای رسیدن به حالت مورد نظر ایجاد کرده ایم. یکی از کاربردهای این سیستم در کروز کنترل خودرو است که شما سرعت را مثلا در ۱۲۰ کیلومتر در ساعت تنظیم میکنید و خودرو اجازه عبور از این سرعت را نمی دهد و اگر سرعت شما کمتر از این عدد باشد به صورت خودکار با افزایش گاز سرعت خودرو را به هدف میرساند.
تولید ناب
کنترل موجودی، که به خصوص در تولید ناب استفاده میشود، تلاشی با اهرم بالا برای مدیریت دقیق اقدامات اصلاحی یک فرآیند متعادل سازی طبیعی است. برای جلوگیری از انباشت سرمایه در انبارهای بزرگ موجودی، هدف این است که محصول کافی برای تکمیل سفارشات فعلی در دسترس باشد. با افزایش فروش، تولید (اقدام اصلاحی) افزایش مییابد تا زمانی که موجودی واقعی به موجودی مورد نیاز نزدیک شود، و سپس تولید کاهش مییابد تا زمانی که موجودی بیشتری مورد نیاز باشد.
چالش در اینجا، مانند هر فرآیند متعادلسازی، مدیریت زمان تاخیر در تنظیم سطوح مورد نظر است.
جمع بندی
همه فرآیندهای متعادل سازی که از حلقههای منفی استفاده میکنند دارای ساختار هدف جوی یکسانی هستند. در برخی، مانند مثال قهوه، اقدام اصلاحی آنقدر منفعل است که به نظر میرسد، وجود ندارد. نمونههای دیگر، مانند کنترل موجودی، اقدام اصلاحی صریح تری دارند. یادگیری شناسایی فرآیندهای متعادل کننده در سازمان میتواند به شما کمک کند تا بفهمید چرا به نظر میرسد برخی از سیستمهای علی رغم بهترین نیت در برابر تغییر مقاومت میکنند. هنگامی که ساختار یک فرآیند متعادل سازی و نحوه مقابله با آن توسط حلقههای دیگر را درک کردید، میتوانید استراتژیهایی برای اقدام موثر طراحی کنید.
ساختار عمومی
ما ساختار عمومی را مطالعه میکنیم و سپس رفتار ممکنی را که میتواند ایجاد کند بررسی میکنیم.
نمودار مدل
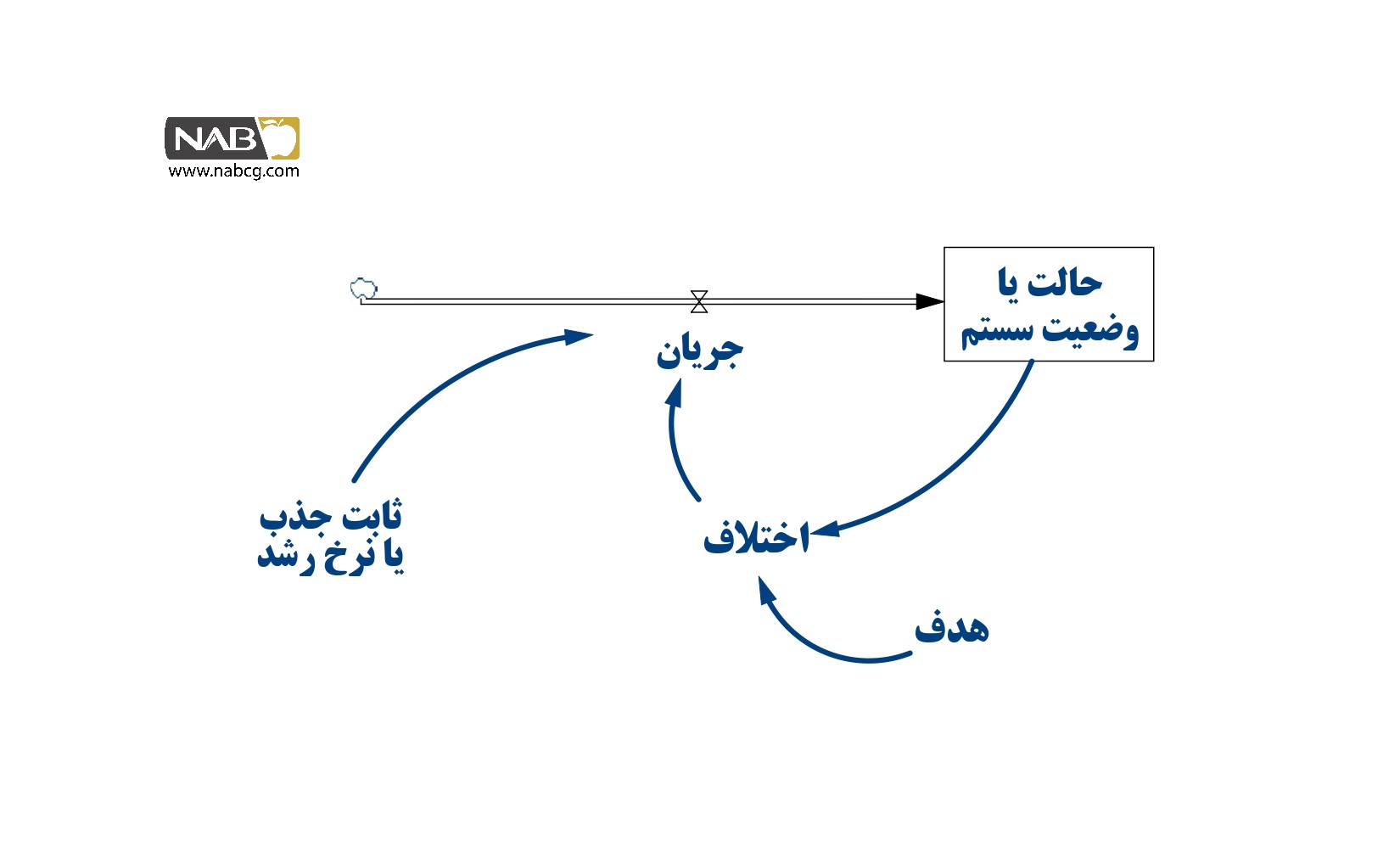
نمودار ساختار مدل عمومی هدف جو در شکل نشان داده شده است. در معادله ، اختلاف را در نرخ رشد ضرب میکنیم یا حالت را بر ثابت زمانی تقسیم میکنیم. ثابت زمانی صرفاً معادل نرخ رشد است.
معادلات مدل
معادلات ساختار عمومی عبارتند از:
اختلاف= هدف-حالت یا وضعیت سستم
ثابت جذب یا نرخ رشد=0.1
جریان= اختلاف*ثابت جذب یا نرخ رشد
حالت یا وضعیت سستم= INTEG ( جریان,100)
هدف=200
رفتار نمونه
رفتار مثال بالا به شکل زیر می باشد
مراجع:
بینشهای مرتبط

مدل های پایه – مدل ...

مراجع آزمون و صحه گذاری

علیت در مقابل همبستگی




