

1.مقدمه
برنامهریزی یکی از بنیادیترین بخشهای هوش مصنوعی است؛ بخشی که به سیستم کمک میکند تصمیم بگیرد چه کاری را انجام دهد، از چه مسیری پیش برود، چه مراحلی را طی کند و در نهایت چگونه به هدف برسد. اگر یادگیری ماشین به سیستمها توان «یادگیری» میدهد، برنامهریزی توان «فکر کردن و انتخاب بهترین مسیر» را فراهم میکند.
در دنیای واقعی، بسیاری از وظایف پیچیده تنها با یادگیری انجام نمیشوند؛ بلکه نیازمند یک ساختار منطقی و مرحلهبهمرحله هستند. برای مثال، وقتی یک ربات میخواهد یک فنجان را از روی میز بردارد، باید بداند:از کجا حرکت کند ، چه مسیری را انتخاب کند ، با چه زاویهای دستش را جلو ببرد ، بعد از برداشتن فنجان چه اقدامی انجام دهد .این فرایند دقیقاً همان چیزی است که در هوش مصنوعی «برنامهریزی» نام دارد.
این مقاله بررسی میکند که برنامهریزی در هوش مصنوعی چیست، چه انواعی دارد، چگونه انجام میشود، چه کاربردهایی دارد و چرا جزء حیاتی سیستمهای هوشمند بهویژه عاملها (Agents) به حساب میآید.
2.برنامهریزی در هوش مصنوعی چیست؟
برنامهریزی در هوش مصنوعی فرآیندی است که طی آن سیستم، با در نظر گرفتن وضعیت فعلی و هدف نهایی، بهترین توالی از اقدامات را انتخاب میکند تا از نقطه شروع به نتیجه مطلوب برسد. به بیان ساده، برنامهریزی همان توانایی «فکر کردن پیش از عمل» است؛ قابلیتی که به هوش مصنوعی کمک میکند مانند انسان مسیرها را مقایسه کند، پیامدها را بسنجد و مناسبترین گزینه را برگزیند.
در یک سیستم برنامهریز، ابتدا وضعیت موجود تحلیل میشود، سپس هدف مشخص میگردد و در ادامه مجموعه اقداماتی که میتواند سیستم را به هدف نزدیک کند بررسی میشود. در نهایت، سیستم با کنار هم قرار دادن این اطلاعات، برنامهای میسازد که بهترین مسیر ممکن را طی کند. این سازوکار هنگامی اهمیت بیشتری پیدا میکند که محیط پیچیده باشد، تصمیمگیری چندمرحلهای لازم باشد و سیستم مجبور شود از میان مسیرهای متعدد، یکی را هوشمندانه انتخاب کند.
برای مثال، یک ربات نظافتگر تنها با حرکت کردن تصادفی نمیتواند خانه را تمیز کند. باید بداند از کجا شروع کند، چه مسیری بهینهتر است، کجا احتمال برخورد با مانع وجود دارد و در چه زمانی باید به شارژ برگردد. این مجموعه تصمیمها تنها زمانی امکانپذیر است که ربات قادر به برنامهریزی باشد و بتواند قبل از انجام هر اقدام، پیامد آن را بسنجد.
به طور خلاصه، برنامهریزی توانایی تصمیمگیری هدفمحور و چندمرحلهای را به سیستم میدهد و آن را از یک موجود صرفاً واکنشی، به یک عامل هوشمند تبدیل میکند—عاملی که میتواند آینده را پیشبینی کند، مسیر منطقی انتخاب کند و رفتار خود را با شرایط محیطی سازگار سازد.
3.دلایل اهمیت برنامهریزی در هوش مصنوعی
برنامهریزی یکی از حیاتیترین مؤلفههای هوش مصنوعی است، زیرا بسیاری از تصمیمهای دنیای واقعی صرفاً با یادگیری یا تشخیص الگو قابل حل نیستند. سیستمهای هوشمند باید بتوانند از میان مسیرهای مختلف، بهترین گزینه را انتخاب کنند، پیامدهای هر انتخاب را بسنجند و مجموعهای از اقدامات را بهصورت مرحلهبهمرحله اجرا کنند. این همان نقطهای است که برنامهریزی نقش اصلی خود را نشان میدهد و هوش مصنوعی را از یک سامانه واکنشی، به یک عامل هدفمحور و استراتژیک تبدیل میکند.
3.1 تصمیمگیری هدفمحور
برنامهریزی به سیستم اجازه میدهد تنها به ورودیها پاسخ ندهد، بلکه «برای رسیدن به یک هدف مشخص، استراتژی طراحی کند».
در این رویکرد، هوش مصنوعی آینده را نیز در نظر میگیرد، پیامدها را میسنجد و مسیر مناسب را انتخاب میکند؛ دقیقاً مشابه روشی که انسان هنگام حل مسائل چندمرحلهای به کار میبرد.
3.2 مدیریت وظایف چندمرحلهای
وظایف پیچیده معمولاً شامل مجموعهای از اقدامات وابسته به هم هستند.
برنامهریزی کمک میکند که سیستم:
- مسیر انجام کار را تعیین کند
- توالی اقدامات را مشخص کند
- در صورت تغییر شرایط، برنامه را اصلاح یا بازسازی کند
به این ترتیب، AI قادر میشود فرآیندهای طولانی و چندمرحلهای را به صورت منظم و منطقی مدیریت کند.
3.3 کارایی بیشتر در محیطهای پویا
در دنیای واقعی، شرایط ثابت نیستند؛ موانع جدید ظاهر میشوند، اولویتها تغییر میکنند و اطلاعات ناقص یا نادقیق هستند.
برنامهریزی این امکان را میدهد که سیستم:
- با تغییرات محیط سازگار شود
- مسیرهای جدید را در لحظه پیدا کند
- برنامه فعلی را با شرایط تازه هماهنگ کند
این ویژگی در رباتیک، خودروهای خودران و محیطهای پیچیده بسیار حیاتی است.
3.4 همکاری بهتر و قابلپیشبینیتر با انسان
وقتی سیستم هوشمند برنامه دارد، رفتار آن:
- قابل پیشبینیتر
- قابل توضیحتر
- و هماهنگتر با انسان
میشود.
این موضوع در حوزههایی مانند اتوماسیون، تعامل انسان–ماشین، رباتیک مشارکتی و محیطهای صنعتی اهمیت زیادی دارد.
3.5 عنصر اصلی استقلال در Agentهای خودمختار
عاملهای هوشمند—از رباتها و پهپادها تا سیستمهای خودران و Agentهای نرمافزاری—برای استقلال به برنامهریزی نیاز دارند.
بدون برنامهریزی، Agent نمیتواند:
- هدفگذاری کند
- مسیر مناسب را انتخاب کند
- تصمیمهای چندمرحلهای بگیرد
- در محیطهای ناشناخته عمل کند
برنامهریزی درواقع «مغز تصمیمساز» این عاملهاست.
3.6 استفاده بهینه از منابع
در بسیاری از محیطها منابع محدود هستند:
زمان، انرژی، محاسبات و مسیرهای قابل انتخاب.
برنامهریزی به سیستم کمک میکند:
- بهترین مسیر را انتخاب کند
- منابع را حفظ کند
- هزینه را کاهش دهد
- بازدهی تصمیمگیری را افزایش دهد
3.7 قابلیت توضیحپذیری (Explainability)
در مقایسه با روشهای یادگیری عمیق، برنامهریزی ساختاری شفاف دارد.
میتوان دقیقاً توضیح داد:
- چرا یک مسیر انتخاب شده
- چه اقداماتی ضروری بوده
- و برنامه چگونه شکل گرفته
این ویژگی برای حوزههای حساس مانند پزشکی، هوافضا و امنیت بسیار ارزشمند است.
3.8نقش کلیدی در عاملهای مدرن و LLM Agents
در نسل جدید عاملهای مبتنی بر مدلهای زبانی (LLM Agents)، برنامهریزی دوباره به مرکز توجه بازگشته است.این عاملها برای انجام کارهای پیچیده—مثل رزرو سفر، تحلیل داده، حل مسئله، کنترل ربات—نیاز دارند:
- زنجیرهای از اقدامات تولید کنند
- از بازخوردها یاد بگیرند
- برنامه خود را اصلاح کنند
بدون برنامهریزی، LLM Agents فقط متن تولید میکنند؛با برنامهریزی، تبدیل به «عاملهای هوشمند واقعی» میشوند.
بدون برنامهریزی، هوش مصنوعی موجودی واکنشی و لحظهای است؛اما با برنامهریزی، قادر است فکر کند، آینده را پیشبینی کند، مسیر بهینه را انتخاب کند و با پیچیدگیهای دنیای واقعی سازگار شود.
4.انواع برنامهریزی در هوش مصنوعی
روشهای برنامهریزی در هوش مصنوعی بسته به نوع محیط، میزان قطعیت، ساختار مسئله و نوع عامل هوشمند متفاوت هستند. در ادامه، مهمترین انواع برنامهریزی بررسی میشوند.
4.1 برنامهریزی تقدممحور (Forward Planning)
در این روش، سیستم از وضعیت فعلی شروع میکند و با بررسی همه اقدامات ممکن، پیش میرود تا به وضعیت هدف برسد.
مثال:رباتی که از نقطه A شروع میکند و مسیرهای مختلف را بررسی میکند تا به نقطه B برسد.
مزایا:
- ساده و شهودی
- مناسب محیطهایی با وضعیت اولیه مشخص
عیب:
- در فضاهای بزرگ و پیچیده، تعداد حالتها زیاد میشود.
4.2 برنامهریزی پسرونده (Backward Planning)
در این روش سیستم از هدف شروع میکند و قدمبهقدم بررسی میکند برای رسیدن به آن هدف چه پیشنیازهایی لازم است.
مثال:اگر هدف «انتقال یک شیء» باشد، باید بررسی شود که:برداشتن شیء → حرکت به مکان موردنظر → رهاکردن.
مزایا:
- مناسب وقتی که هدف مشخص اما وضعیت اولیه مبهم است.
- جستوجو سریعتر انجام میشود.
4.3 برنامهریزی سلسلهمراتبی (Hierarchical Planning – HTN)
در این روش کارهای بزرگ به کارهای کوچکتر تقسیم میشوند.سیستم ابتدا یک برنامه کلی میسازد و آن را مرحلهبهمرحله به وظایف خرد تبدیل میکند.
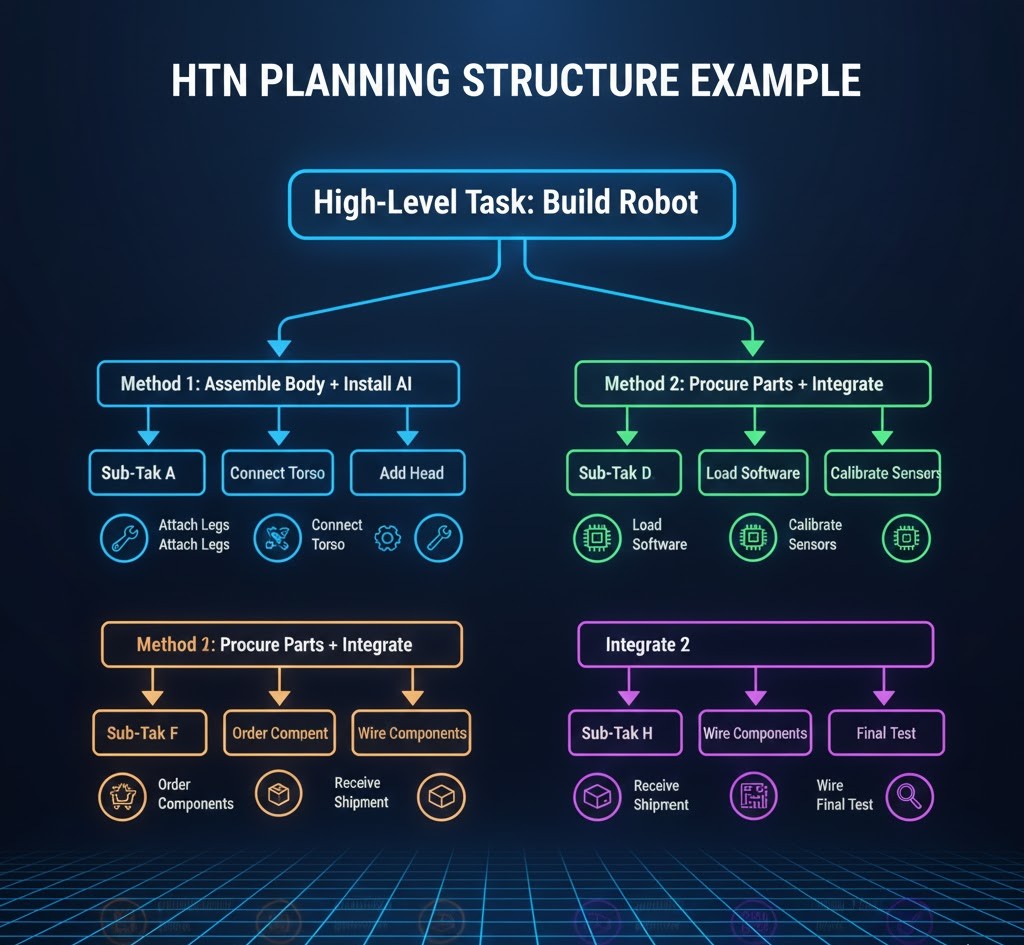
مثال:ماموریت یک ربات: «پخت غذا» → خرد کردن → روشن کردن اجاق → زمانبندی پخت.
مزایا:
- مناسب وظایف پیچیده
- قابل مدیریت و انعطافپذیر
4.4 برنامهریزی احتمالاتی (Probabilistic Planning)
وقتی محیط نامطمئن باشد و نتیجه هر اقدام مشخص نباشد، سیستم از احتمال برای پیشبینی استفاده میکند.
مثال:خودروی خودران با احتمال برخورد، لغزش، تغییر سرعت دیگر خودروها تصمیم میگیرد.
مزایا:
- مناسب محیطهای واقعی و پویا
- تطبیقپذیری بالا
4.5 برنامهریزی مبتنی بر مدل (Model-based Planning)
در این روش، سیستم یک مدل از محیط یا مسئله دارد و تصمیمها را بر اساس آن میگیرد.
مثال:مدل MDP (فرآیندهای تصمیمگیری مارکوف) برای انتخاب بهترین عمل.
مزایا:
- دقیق
- قابل تحلیل
4.6 برنامهریزی بدون مدل (Model-free Planning)
در این روش سیستم مدل دقیقی از محیط ندارد و براساس تجربه یا آزمونوخطا تصمیم میگیرد.
مثال:بسیاری از روشهای یادگیری تقویتی.
مزایا:
- مناسب محیطهای ناشناخته
- نیاز به دانش اولیه ندارد
4.7 برنامهریزی مبتنی بر قیود (Constraint-based Planning)
در این نوع برنامهریزی مجموعهای از قیود و محدودیتها وجود دارد و سیستم باید برنامهای پیدا کند که تمام این محدودیتها را رعایت کند.
مثال:برنامهریزی خطوط تولید، زمانبندی ماشینها یا برنامهریزی پروازها.
4.8 برنامهریزی در زمان واقعی (Real-Time Planning)
وقتی شرایط سریع تغییر میکند، سیستم باید در لحظه تصمیم بگیرد.
مثال:بازیهای ویدیویی، پهپادها، خودروهای خودران.
چالش:سرعت بالا ، واکنش سریع ،پردازش همزمان دادههای جدید
4.9 برنامهریزی در فضای حالت (State-Space Planning)
در این روش، تمام وضعیتهای ممکن و اقداماتی که آنها را تغییر میدهد در یک فضای حالت نمایش داده میشود.
مثال:مسئله عبور پازل، ماز، گرافهای پیچیده.
4.10 برنامهریزی چندعاملی (Multi-Agent Planning)
وقتی چند عامل یا ربات با هم کار میکنند، باید برنامهای هماهنگ بسازند که:تعارض ایجاد نشود ، نقشها تقسیم شود ،رفتوآمدها مدیریت شوند
4.11برنامهریزی کلاسیک (Classical Planning) –
- مدلی از برنامهریزی که فرض میکند محیط:
- کاملاً معلوم است
- بدون عدمقطعیت است
- اقدامات قطعی هستند
- مزایا: سریع، ساختاریافته، پایه بیشتر الگوریتمها
- کاربرد: الگوریتمهای STRIPS، GraphPlan
4.12 برنامهریزی غیرکلاسیک(Non-Classical Planning) – برای محیطهای واقعی
این دسته، برنامهریزیهایی مانند:
- برنامهریزی در محیطهای نامطمئن
- برنامهریزی احتمالاتی
- برنامهریزی پویا
- زمان واقعی
- چندعاملی
را شامل میشود.
مثال:چند ربات انبار آمازون که باید بدون برخورد کار کنند.
| بهترین کاربردها | توضیح کوتاه | نوع برنامهریزی |
|---|---|---|
| رباتیک، مسیریابی، حل مسئله | از وضعیت فعلی شروع میکند و قدمبهقدم به سمت هدف پیش میرود. | تقدممحور (Forward Planning) |
| وظایف با هدف دقیق، حل مسائل معکوس | از هدف شروع میکند و پیشنیازهای هر مرحله را مشخص میکند. | پسرونده (Backward Planning) |
| رباتیک پیچیده، عملیات صنعتی | کارهای بزرگ را به وظایف کوچکتر تبدیل میکند. | سلسلهمراتبی (HTN) |
| خودروهای خودران، محیطهای پویا | تصمیمگیری در شرایط نامطمئن و متغیر را مدیریت میکند. | احتمالاتی (Probabilistic Planning) |
| مسائل ساختاریافته و پیشبینیپذیر | از مدل محیط برای شبیهسازی و انتخاب مسیر استفاده میکند. | مبتنی بر مدل (Model-based) |
| یادگیری تقویتی، محیطهای ناشناخته | بدون مدلسازی قبلی، با تجربه و آزمونوخطا تصمیمگیری میکند. | بدون مدل (Model-free) |
| زمانبندی، مدیریت منابع، خطوط تولید | تصمیمگیری بر اساس مجموعهای از محدودیتها و شرایط. | قیودمحور (Constraint-based) |
| انبارهای هوشمند، سیستمهای توزیعشده | برنامهریزی هماهنگ میان چندین عامل یا ربات. | چندعاملی (Multi-Agent Planning) |
| پهپادها، خودروهای خودران، بازیها | تصمیمگیری سریع در شرایطی که تغییرات لحظهای رخ میدهد. | برنامهریزی در زمان واقعی (Real-time) |
5.اجزای یک سیستم برنامهریزی در هوش مصنوعی
هر سیستم برنامهریزی در هوش مصنوعی از مجموعهای از اجزا تشکیل شده است که تعامل هماهنگ میان آنها، امکان تحلیل وضعیت، انتخاب مسیر و اجرای برنامه را فراهم میکند. در ادامه مهمترین مؤلفههای یک سیستم برنامهریز تشریح میشود
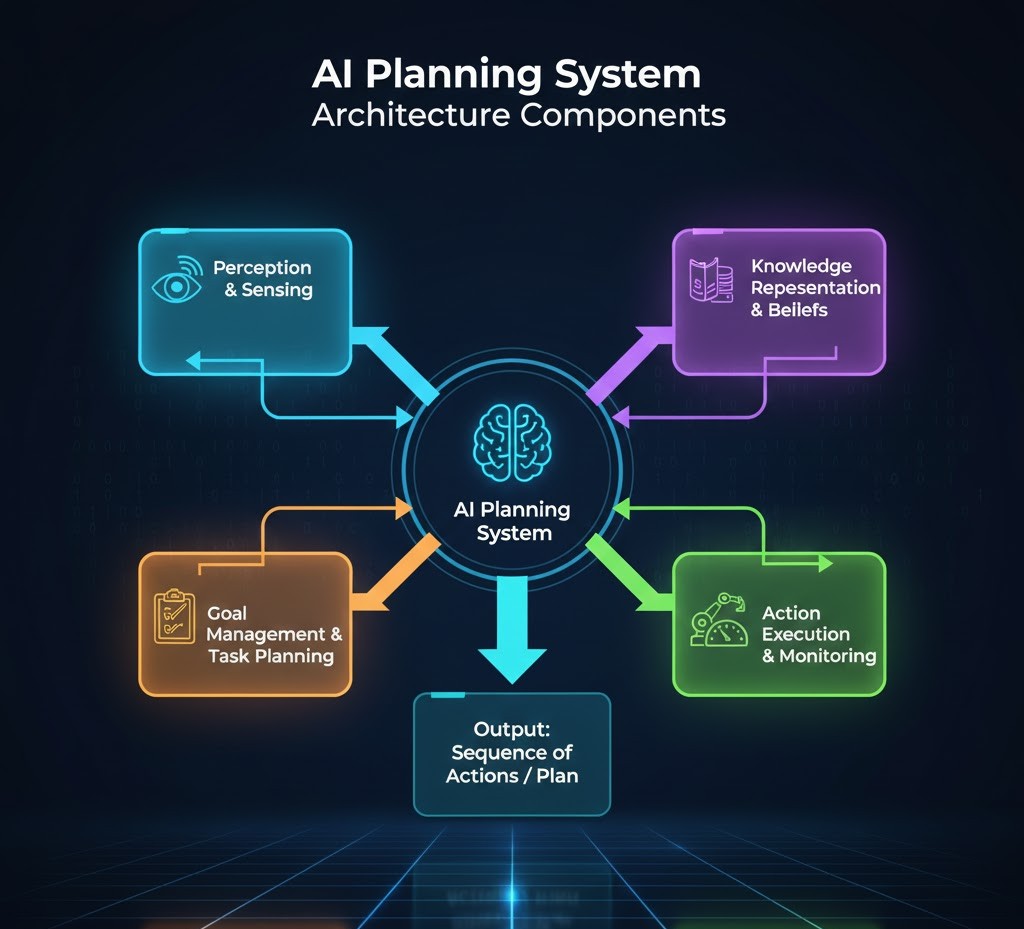
5.1 مدلسازی وضعیت (State Representation)
اولین قدم در برنامهریزی، تعریف وضعیت فعلی محیط است.سیستم باید بداند:
- الان کجاست؟
- چه اطلاعاتی در دسترس است؟
- محیط چه شرایطی دارد؟
مثال:در یک ربات، وضعیت میتواند شامل موقعیت، باتری و موانع باشد.
5.2 تعریف هدف (Goal Specification)
هدف مشخص میکند سیستم باید به چه نتیجهای برسد.بدون هدف، برنامهریزی معنی ندارد.
مثال هدفها:رسیدن به یک نقطه ، جمعآوری یک شی ، تکمیل چند وظیفه به ترتیب. هدف باید روشن، قابل اندازهگیری و منطقی باشد.
5.3 مجموعه اقدامات ممکن (Action Space)
سیستم باید بداند چه کارهایی اجازه دارد انجام دهد.
مثلاً در ربات:حرکت به جلو ، چرخش ، برداشتن شیء ، توقف .در برنامهریزی، این مجموعه تعیین میکند سیستم چگونه میتواند وضعیت فعلی را تغییر دهد.
5.4 تابع انتقال (Transition Model)
این تابع توضیح میدهد که هر اقدام چه تغییری ایجاد میکند.
مثال:اگر ربات یک قدم جلو برود ⭠ موقعیت جدید(x+1 , y) =
در برنامهریزی احتمالاتی، این مدل احتمالی است:مثلاً ۹۰٪ احتمال حرکت موفق، ۱۰٪ احتمال لغزش.
5.5 تابع هزینه یا پاداش
برای انتخاب بهترین مسیر، سیستم باید بداند:
- کدام مسیر کمهزینهتر است؟
- کدام اقدام پرخطر است؟
- کدام سرعت بیشتری دارد؟
این تابع کمک میکند تصمیمگیری «بهینه» باشد نه فقط «ممکن».
5.6 موتور برنامهریزی (Planner Engine)
مهمترین بخش سیستم است.
این موتور با استفاده از اطلاعات بالا:
- وضعیت فعلی را تحلیل میکند
- مسیرهای مختلف را میسنجد
- بهترین برنامه را انتخاب میکند
الگوریتمهایی مثل:
- A*
- Graph Search
- Dynamic Programming
- MDP Planners
- HTN Planners
در این مرحله استفاده میشوند.
5.7 ماژول اجرا (Execution Module)
بعد از ساخت برنامه، سیستم باید بتواند آن را در محیط واقعی اجرا کند.وظایف:اجرای دستورات ، رصد وضعیت ، بررسی موفقیت اقدامات ، اعمال تغییرات لازم
5.8 ماژول نظارت و بازخورد (Monitoring & Feedback)
در محیط واقعی همیشه همه چیز طبق برنامه پیش نمیرود.این ماژول وظیفه دارد:وضعیت را لحظهای بررسی کند ، اگر مشکلی پیش آمد، هشدار دهد ، برنامه را اصلاح کند .بدون این بخش، برنامهریزی در محیطهای پویا امکانپذیر نیست.
5.9 ماژول تطبیق و بهروزرسانی برنامه (Re-planning)
اگر شرایط تغییر کند—مثلاً مانعی ظاهر شود یا هدف عوض شود—سیستم باید بتواند برنامه جدیدی بسازد.این همان ویژگی است که سیستمهای هوشمند را از سیستمهای قدیمی و خشک متمایز میکند.
این اجزا در کنار یکدیگر چرخه تصمیمسازی سیستم را تشکیل میدهند و امکان میدهند عامل هوشمند بتواند در محیطهای پیچیده به صورت هدفمحور و سازگار عمل کند.
6.چالشهای برنامهریزی در هوش مصنوعی
با اینکه برنامهریزی یکی از قدرتمندترین بخشهای هوش مصنوعی است، اما اجرای آن در محیطهای واقعی آسان نیست. بسیاری از چالشهای AI دقیقاً در مرحله برنامهریزی نمایان میشوند؛ جایی که سیستم باید بهترین تصمیم را از میان تعداد بسیار زیادی از انتخابها بگیرد. در ادامه مهمترین چالشهای برنامهریزی را بررسی میکنیم.
۱. فضای حالت بسیار بزرگ
- در بسیاری از مسائل، تعداد حالات و مسیرهای ممکن بهقدری زیاد است که سیستم نمیتواند همه آنها را بررسی کند.
- مثال:در مسیریابی ربات، میلیونها حالت ممکن وجود دارد.چالش:سیستم باید بتواند بهترین مسیر را بدون بررسی همه حالتها پیدا کند.
۲. عدم قطعیت و تغییرپذیری محیط
- در دنیای واقعی:شرایط دائماً تغییر میکند ، موانع جدید بهوجود میآیند ، اطلاعات همیشه کامل نیستند. این عدمقطعیت برنامهریزی را دشوار میکند.
۳. هزینه محاسباتی بالا
- برنامهریزی بهخصوص در مدلهای پیچیده یا محیطهای بزرگ، نیازمند محاسبات سنگین است. GPU/CPU قدرتمند و شبکه سریع لازم است.
۴. نیاز به تصمیمگیری در زمان واقعی
- در سیستمهایی مثل خودروهای خودران یا رباتهای تعاملی، برنامه باید در چند میلیثانیه ساخته شود.چالش:سیستم باید هم سریع باشد و هم دقیق.
۵. ترکیب دشوار یادگیری و برنامهریزی
- در بسیاری از پروژهها، سیستمها باید:هم از داده یاد بگیرند ، هم برنامهریزی کنند. ایجاد هماهنگی بین این دو (خصوصاً در مدلهای تقویتی) هنوز یکی از چالشهای اصلی پژوهش در AI است.
۶. خطاهای تجمعی
- اگر یک برنامه از چند مرحله تشکیل شده باشد، حتی یک خطای کوچک در مرحله اول میتواند همه مراحل بعدی را تحتتأثیر قرار دهد.مثال:اگر ربات ۲ سانتیمتر مسیر را اشتباه برود، ممکن است در پایان کار چند متر از مسیر درست منحرف شده باشد.
۷. نیاز به مدل دقیق از محیط
- برنامهریزی دقیق نیازمند مدلسازی دقیق از محیط است، اما: مدلسازی همیشه ساده نیست ، داده ممکن است ناقص یا پر از Noise باشد ، محیطهای واقعی پیچیده و پویا هستند.
۸. تولید برنامههای قابلتوضیح
- در بسیاری از صنایع مثل پزشکی یا هوافضا، برنامه باید:قابل توضیح ، قابل پیگیری و قابل اعتماد باشد.ساخت چنین برنامههایی دشوار است.
۹.دشواری ترکیب یادگیری و برنامهریزی (Learning + Planning Integration)
در بسیاری از سیستمهای مدرن، عامل باید هم از داده یاد بگیرد و هم برنامهریزی انجام دهد. هماهنگی بین یادگیری تقویتی، مدلسازی محیط و انتخاب برنامه بهینه یکی از چالشهای فعال پژوهشی است.
این چالشها نشان میدهند که با وجود پیشرفتهای چشمگیر، برنامهریزی همچنان یکی از پیچیدهترین بخشهای هوش مصنوعی است و برای کار در محیطهای واقعی نیازمند ترکیب با یادگیری، مدلسازی پیشرفته و راهکارهای مقیاسپذیر است.
7.کاربردهای برنامهریزی در هوش مصنوعی
برنامهریزی یکی از کلیدیترین فرایندهای هوش مصنوعی است و در بسیاری از سیستمهایی که نیازمند تصمیمگیری چندمرحلهای، مدیریت شرایط پیچیده و رفتار هدفمحور هستند، نقشی اساسی ایفا میکند. در ادامه مهمترین کاربردهای برنامهریزی معرفی میشود.
۱. رباتیک (Robotics)
در رباتها برنامهریزی برای حرکت، دستکاری اشیا، اجتناب از موانع و هماهنگی چند ربات ضروری است.
ربات باید مسیر بهینه را انتخاب کند، حالتهای آینده را پیشبینی کند و برنامه را در صورت تغییر شرایط اصلاح نماید.
۲. خودروهای خودران (Autonomous Vehicles)
این سیستمها در هر لحظه باید مسیر، سرعت، فاصله، موانع و شرایط محیطی را تحلیل کنند.
برنامهریزی کمک میکند خودرو بتواند:
- مسیر بهینه انتخاب کند
- در شرایط خطر تصمیمگیری لحظهای داشته باشد
- رفتار دیگر خودروها را پیشبینی کند
۳. مدیریت انبار و لجستیک (Warehouse & Logistics Planning)
در انبارهای هوشمند مانند آمازون، رباتها باید:
- مسیر حرکت را تنظیم کنند
- با یکدیگر برخورد نکنند
- توالی برداشت و تحویل کالا را بهینه کنند
این تماماً برنامهریزی است.
۴. زمانبندی و مدیریت منابع (Scheduling & Resource Management)
برنامهریزی در:
- خطوط تولید
- برنامهریزی پروازها
- زمانبندی پروژهها
- مدیریت منابع انرژی
نقش اصلی دارد.
هدف همیشه انتخاب بهترین توالی با کمترین هزینه و بیشترین بازده است.
۵. بازیهای ویدئویی و شبیهسازی (Games & Simulation)
هوش مصنوعی بازیها از برنامهریزی برای:
- تصمیمگیری بازیکنان غیرانسان
- هدایت یگانها
- شبیهسازی رفتار واقعی دشمن
استفاده میکند.
۶. عاملهای هوشمند (AI Agents)
- عاملهای مدرن—چه مبتنی بر یادگیری باشند و چه مبتنی بر مدلهای زبانی—برای انجام وظایف پیچیده نیازمند برنامهریزی هستند.
- مثال: عاملهایی که میتوانند رزرو سفر انجام دهند، تحلیل داده کنند، یا چند گام پشتسرهم اجرا کنند.
۷. پزشکی و سلامت (Medical AI)
برنامهریزی در سیستمهای پزشکی برای:
- انتخاب مرحلهبهمرحله روش درمان
- مدیریت مسیر درمان
- بهینهسازی اتاقهای عمل و تجهیزات
به کار میرود.
۸. رباتهای امدادی و عملیات خطرناک
در محیطهای خطرناک مانند خرابیها، آتشسوزی یا مناطق آلوده، رباتهای امدادی باید تصمیمهای چندمرحلهای دقیق بگیرند—چیزی که بدون برنامهریزی ممکن نیست.
برنامهریزی یکی از ستونهای اصلی تصمیمگیری هوشمند است و تقریباً در تمام حوزههای هوش مصنوعی که نیازمند تفکر چندمرحلهای، پیشبینی و بهینهسازی هستند کاربرد دارد.
8.مقایسه انواع برنامهریزی در هوش مصنوعی
انواع مختلف برنامهریزی هریک برای محیطها و مسائل متفاوتی مناسب هستند. درک تفاوتها به انتخاب روش صحیح کمک میکند. جدول زیر مهمترین انواع برنامهریزی را از نظر مزایا، محدودیتها و کاربرد مناسب مقایسه میکند.
| بهترین کاربردها | محدودیتها | مزایا | نوع برنامهریزی |
|---|---|---|---|
| رباتیک ساده، مسیریابی | انفجار حالت در مسائل بزرگ | ساده و شهودی | تقدممحور (Forward) |
| برنامهریزی وظایف با هدف واضح | وابستگی زیاد به تعریف دقیق هدف | جستجوی کمتر، مناسب برای هدفهای مشخص | پسرونده (Backward) |
| رباتیک پیشرفته، عملیات صنعتی | نیازمند تعریف دقیق زیرفرآیندها | مناسب مسائل پیچیده؛ مدیریتپذیر | سلسلهمراتبی (HTN) |
| خودروهای خودران، محیطهای نامطمئن | پیچیدگی محاسباتی زیاد | سازگاری بالا با محیط پویا | احتمالاتی |
| مسائل ساختاریافته و تحلیلی | نیازمند مدلسازی کامل محیط | تحلیل دقیق؛ قابل پیشبینی | مبتنی بر مدل |
| یادگیری تقویتی، محیطهای جدید | نیاز به آزمونوخطای زیاد | مناسب محیطهای ناشناخته | بدون مدل |
| برنامهریزی تولید، زمانبندی | زمانبر در مسائل بزرگ | کنترل دقیق محدودیتها | قیودمحور |
| انبارهای هوشمند، چند ربات | احتمال تعارض زیاد؛ پیچیده | هماهنگی میان چند عامل | چندعاملی |
| پهپاد، خودروهای خودران | دقت کمتر در برخی شرایط | واکنش سریع | زمان واقعی (Real-time) |
| محیطهای ایستا و قابل پیشبینی | عدمپشتیبانی از عدمقطعیت | ساختار ساده، الگوریتمهای شناختهشده | کلاسیک |
| محیطهای پویا، نامطمئن و بزرگ | طراحی سختتر | مناسب دنیای واقعی | غیرکلاسیک |
هر رویکرد برنامهریزی برای نوع خاصی از محیط و مسئله مناسب است و انتخاب درست آن میتواند کارایی سیستم هوشمند را بهطور قابلتوجهی افزایش دهد.
نتیجهگیری
برنامهریزی یکی از پایههای اصلی هوش مصنوعی است و به سیستمها امکان میدهد مانند انسان فکر کنند، اهداف را درک کنند و برای رسیدن به آنها مسیرهای منطقی و چندمرحلهای بسازند. بدون برنامهریزی، عاملهای هوشمند فقط واکنشی عمل میکنند و قادر به مدیریت شرایط پیچیده، تصمیمگیری هدفمحور یا سازگاری با محیطهای پویا نخواهند بود.
روشهای مختلف برنامهریزی—از برنامهریزی کلاسیک و تقدممحور تا برنامهریزی احتمالاتی، زمانواقعی و چندعاملی—هرکدام در حوزهای خاص کاربرد دارند و انتخاب درست آنها نقش مهمی در ساخت سیستمهای قابلاعتماد و کارآمد دارد. با این حال، چالشهایی مانند فضای حالت بزرگ، عدمقطعیت، نیاز به محاسبات سریع و ادغام دشوار یادگیری و برنامهریزی همچنان وجود دارد.
پیشرفتهای اخیر در ترکیب برنامهریزی با یادگیری تقویتی، مدلهای زبانی و عاملهای خودمختار نسل جدید، مسیر تازهای را برای رفع این چالشها گشوده است. آینده متعلق به سیستمهایی است که بتوانند یادگیری، استدلال و برنامهریزی را همزمان در خود داشته باشند—سیستمهایی که نهفقط از تجربه میآموزند، بلکه میتوانند برای آینده نیز برنامهریزی کنند.
در بسیاری از حوزهها مانند رباتیک، خودروهای خودران، پزشکی، بازیها و لجستیک، این توانایی کلیدی است زیرا به هوش مصنوعی قدرت «تصمیمگیری واقعی» میدهد. همین قدرت است که AI را از یک ابزار ساده به یک شریک هوشمند و قابل اعتماد در دنیای امروز تبدیل میکند.